Projects
Lawn Mower Simulation: Grid Navigation and Obstacle Avoidance
-
Worked in a team of 5 to create a desktop application for simulating mowers cutting grass and avoiding obstacles. Collaborated using Git repo.
- Application parses input file specifying lawn dimensions, starting location, charging stations, enemies (gophers which follow mower), and craters (to avoid).
- Application displays state information such as total grass cut and turn count.
- Application supports ability to stop simulation, step forward one turn, and fast-forward to end of simulation.
- Helped implement heuristic algorithm for mowers to cut as much grass as possible in given scenario and share information via communication channel
-
Specified formal design using UML
-
Developed in virtual machine using Java and Java FX.
Full-Stack Auction Website
-
Worked in a team of 5 to create a full-stack auction website similar to eBay
- Users are able to list items for sale, search using keywords and filtering criteria, purchase items at set price or place bids, rate and review items
- Users are able to view statistics regarding completed sales and auctions.
-
Created EER, IFD, and relational mapping diagrams. Wrote acceptance criteria, task decomposition, and abstract code prior to writing application code.
-
Created application to match formal design document requirements
-
Designed database schema, wrote SQL queries and views, wrote SQL scripts to populate database, wrote back-end Python API/end-points, and wrote front-end Vue.js code.
-
Organized and attended team meetings. Collaborated using Git repo. Helped present final live demo to TAs.
-
Developed in Docker using PostgreSQL (Adminer), Python (FastAPI), and Vue.js
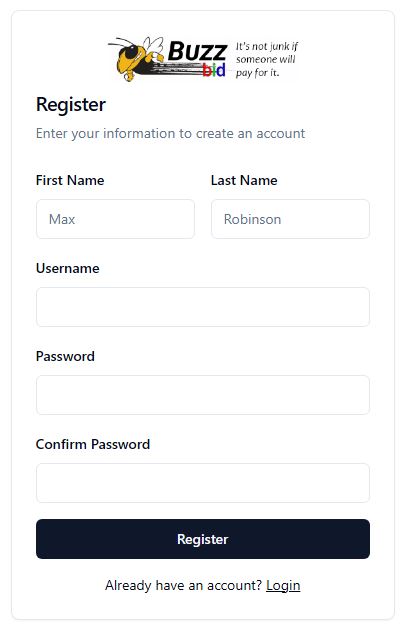
Login screen
Ladder Logic in OpenPLC
-
Used OpenPLC in Linux Mint (VirtualBox) VM to design several ladder-logic diagrams simulating industrial control systems such as:
- A multiple intersection traffic light controller coordinating vehicle and pedestrian traffic
- An industrial process mixing multiple ingredients with timing requirements
- Robot movement towards a moving target including converting binary input to grid navigation
- An elevator in a building with multiple sensors for door open, door in place, and buttons to request elevator on each floor.
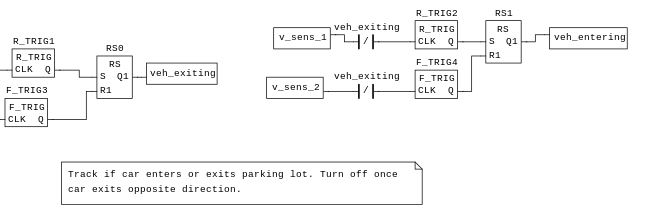
Preview of PLC program to handle a parking lot
Cyber-Physical Systems Security
-
Used Factory I/O to simulate multiple industrial control systems using Function Block programming.
-
Designs included:
- Tank filling/emptying process with logic implemented to reverse operation.
- A conveyor-belt system which sorts boxes based on height using laser sensor, RFID tagging, and displays number of boxes sorted by type. Includes logic to reverse operation.
- A production line which assembles items with multiple parts along converyor belts using a Pick & Place arm.
-
3D scenes were provided with multiple sensors, actuators, and input buttons.
Sample Factory I/O scene
-
Completed for CS-6263: Intro to Cyber-Physical Systems Security.
Unity: Video Game Algorithms
-
Used Unity 3D to implement algorithms and "agent" artifical intelligence techniques used in video games.
-
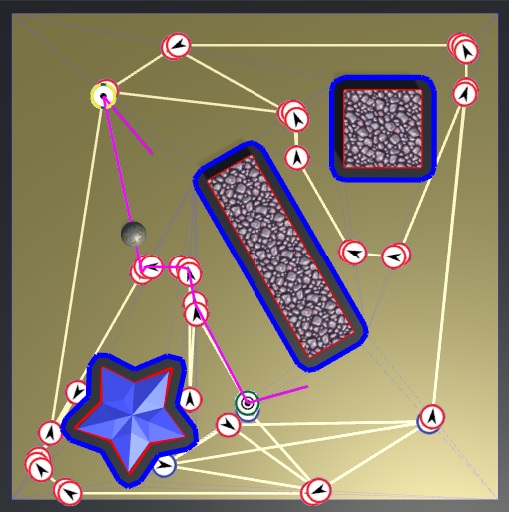
Grid Navigation
- Wrote algorithm to discretize space, superimposing a grid onto game terrain. The grid enables simple collision detection for navigation and obstacle avoidance.
-
Navigation Mesh Generation
- Wrote an algorithm which discretizes navigable space.
- Forms triangles to cover entire space (around obstacles, if needed).
- Merges triangles into larger ones for efficiency.
- Implemented A* algorithm to work on the navmesh I created.
-
Fuzzy Logic Driven Vehicle
- Implemented Fuzzy Logic to autonomously drive a vehicle on procedurally generated track.
- The vehicle follows a set of fuzzy rules to determine when and how much to accelerate, brake, and steer based on road conditions.
Sample of Fuzzy Logic assignment. Not my video.
- Implemented FSM rules and logic for agents to play dodgeball game against AI in various scenarios
Sample of FSM assignment. Not my video.
Completed for CS-7632: Game Artificial Intelligence.
Software-Defined Networks
-
Projects included:
-
Used a software-defined network in Mininet to explore Border Gateway Protocol.
-
Implemented Spanning Tree Protocol host-discovery algorithm in Mininet.
-
Implemented a firewall with rules based on source/destination IP address, MAC address, and port number.
- Used Wireshark to investigate TCP network behavior during high congestion
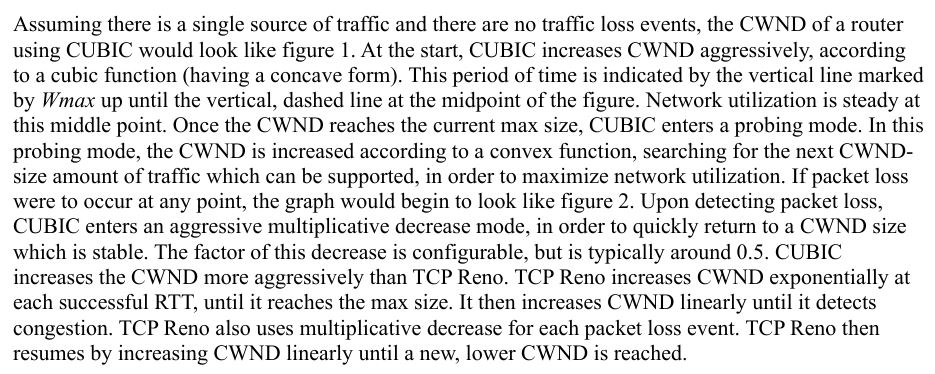 Writing sample from my report
Writing sample from my report
-
-
Completed for CS-6250: Computer Networks.
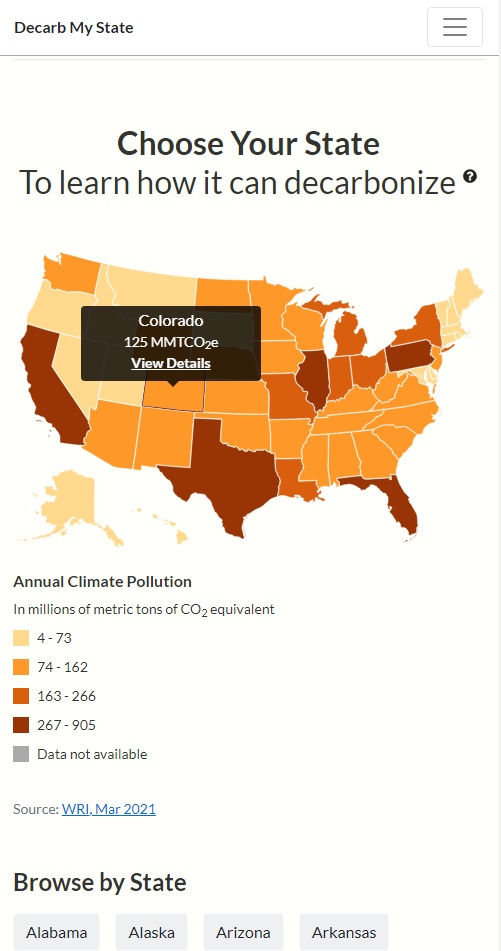
ChiHackNight
-
Volunteered through ChiHackNight and helped with front-end development onDecarb My State to raise awareness about climate pollution.